Группа: Автор
Сообщений: 5927
Пользователь №: 34743
Регистрация: 9-July 08
Место жительства: Москва
Исключительно для освещения загородней поляны, где гуляют пьяные гости. Еще они иногда любят пострелять по воздушным целям. Для всевозможной развлекухи.
--------------------
Нравится, не нравится, терпи моя красавица... Работайте, братья!
В безветренную погоду может и будет все это висеть,но что произойдет при относительно сильных порывах?
Касательно магнитных датчиков - помоему бесперпективно. Движки и прочее хозяйство там таких полей насоздают...
Кроме этого - нужно будет контролировать высоту всего этого дела.
К чему такие сложности? Почему не использовать один мощный двигатель? Тогда не будет никаких перекосов - оно всегда будет лететь вверх. Нужно только будет предотвратить осевое вращение путем добавления хвоста с маломощным винтом как у вертолета. Электроника - всего одна гира от того же вертолета для стабилизации этого самого хвоста.
А еще лучше использовать готовый 3D вертолет для этого, который расчитан на большие нагрузки. Думаю что при таком использовании ресурс у него будет довольно большой. Только двигатель поставить помощнее и винт побольше. Так это уже комплекс - и проверенный девайс, и изменяемый вектор тяги винта и изменяемый угол атаки это не хухры мухры...
Это сообщение отредактировал ivasi - Jan 13 2010, 11:39 PM
Группа: Автор
Сообщений: 5927
Пользователь №: 34743
Регистрация: 9-July 08
Место жительства: Москва
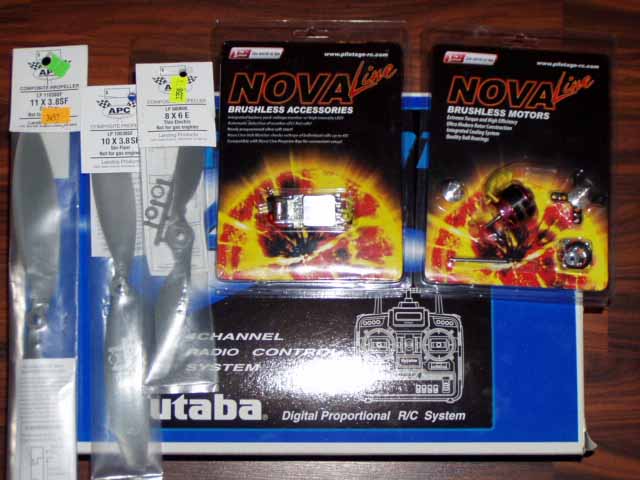
Поначалу я тоже к Аватаровскому варианту примерялся. Но там действительно мозгни хорошие нужны. А вот ссылочка специально для Эдди http://dirty.ru/comments/265546 А это мой вариант http://www.draganfly.com/ . Только что вернулся из магазина "Пилотаж". Есть все! Пока для опытов взял минимальный комплект: - движок с драйвером и разных винтов на пробу. Хочу для начала на стенде погонять движек. Замерить тягу с разными винтами и токами. Пока сам не прочувствую советы не помогут. Если делать квадролет, то пара движков должна вращаться в обратную сторону. Соответственно и винты нужны "обратные". А их нет в продаже. Попробую поискать на разных сайтах. Если не найду, придется ставить компенсаторы противовращения. А из хорошего - в продаже есть карбоновые трубки диаметром 6мм и длиной 1м. Очень прочные и невесомые. По началу хотел делать раму из гимнастического обруча, он 300г весит, а сейчас вижу карбоновая рама не меньше 200г сэкономит.
Это сообщение отредактировал ded - Jan 14 2010, 01:42 PM
Присоединённое изображение (Нажмите для увеличения)
--------------------
Нравится, не нравится, терпи моя красавица... Работайте, братья!
Группа: Автор
Сообщений: 5927
Пользователь №: 34743
Регистрация: 9-July 08
Место жительства: Москва
Собственно америкосы уже нашли оптимальную компановку квадралета, и уже выложили эту птицу на прилавки. http://www.draganfly.com/uav-helicopter/dr...eos/video-3.php И при нем не только целый видеокомплекс с записью, но и еще приладили ИК видеокамеру в 10мкм диапазоне. Такого компактного тепловизора в габаритах обычной веб камеры еще не встречал. С такой ночью в лесу охотник может без труда найти прячущуюся живность. Да и много еще другого - утечки тепла из здания, лесные очаги пожаров и пр. http://www.corebyindigo.com/photon/photon320.cfm Вот бы надыбать такую!
Это сообщение отредактировал ded - Jan 14 2010, 06:11 PM
--------------------
Нравится, не нравится, терпи моя красавица... Работайте, братья!
Группа: Автор
Сообщений: 26728
Пользователь №: 27360
Регистрация: 16-December 07
Место жительства: Ukraine
Я пока не могу такими игрушками похвастать. Сегодня на е-бее только заказал моторчик с платой управления 30-ти амперные. У нас в городе в единственном модельном магазинчике это хозяйство ровно в 10 раз дороже стоит. Так что 2 недельки подожду посылки из Тайваня.. Я всё таки "тазик" буду делать. По краайней мере для прочувствования темы. Уже прикинул аэродинамческую модель. Теоретически должно получиться. По поводу стабилизации в полёте соглашусь с ivasi: без мозгов с кучей датчиков "..упадёть оно барин, упадёть!.." (с) Платы на квадро- и трикоптеры видел продаются. Стоятот 100 убитых президентов. С айфоном видео понравилось в том. что в качестве управляющего элемента встроенный в телефон акселерометр используют. Это удобно: наклоняя телефон наклонять летающую платформу.. В общем темка интересная.
--------------------
«Мышление - это когда ты упрощаешь вещи, а не усложняешь их» /Жак Фреско/
Группа: Автор
Сообщений: 5927
Пользователь №: 34743
Регистрация: 9-July 08
Место жительства: Москва
Эдди, пожалуйста подскажи, где ты видел платы на квадролеты. Я даже простые винты для обратного вращения не могу найти. По крайней мере в Москве. На фирменных квадриках по форме вмнтов хорошо видно попарное распределение направления вращения.
--------------------
Нравится, не нравится, терпи моя красавица... Работайте, братья!
Группа: Автор
Сообщений: 5927
Пользователь №: 34743
Регистрация: 9-July 08
Место жительства: Москва
Зарегистрировался на rcdesign.ru и сразу вышел на нужные винты с обратной ротацией. Можно взять на Hobbyciti.com. Там все старожилы с rcdesign.ru успешно затавариваются. Идеальный вариант для квадриков винт GMS HD 9050 (или 8040) с прямой и обратной ротацией. Примерно по доллару за штуку. Аккумуляторы ЛиПоли на 4500мАч 11В всего 70 баксов. Гиры - начиная от 10 баксов. Рекомендую этот канал.
--------------------
Нравится, не нравится, терпи моя красавица... Работайте, братья!
Группа: Автор
Сообщений: 5927
Пользователь №: 34743
Регистрация: 9-July 08
Место жительства: Москва
Провел серию прогонов движка с разными винтами по диаметру и углу атаки. Результаты таковы - при увеличении диаметра винта обороты падают, но при равных токах тяга остается такой же как у винта меньшего диаметра. В его случае обороты возрастают, но ток при том же положении "газа" тяга сохраняется. Собственно это и надо было предполагать - закон сохранения энергии никто не отменял. Откуда может взяться дополнительная тяга при равной энергии снимаемой с аккумулятора. Удивительно, но движек 10А дает подъемную тягу более 600г, но это на пределе. На токах 5.6А тяга уверенные 350г. И четыре движка квадролета без труда будут таскать 1,5кг общего веса. Сам движек вестит 45г. Чем замечателен квадролет , так это тем, что не надо никаких элеронов, рулей, компенсаторов. Весь пилотаж только за счет перераспределения скоростей четырех движков. Если не требуется высокостабильное зависание, с автоматическим удержанием положения, то вообще все упрощается до предела. Для видео стабилизация нужна, иначе картинка будет прыгать особенно с длинофокусной съемкой. А вот для фото это по-барабану. Щелк, и все! Уже расписал формулы алгоритма управления пилотажем для стандарной четырехканальной аппаратуры пропорционального управления. Есть некоторые важные моменты, но в целом программка для ПИКа очень простая. Линейное преобразование данных от приемника в сигналы четырех движков. Да и схемка электроники простая. Приемник, контроллер без всякого обвеса, драйверы движков, и сами движки. Все. Обязательно пришлось заложить ограничение минимальных оборотов замедляемых движков, чтоб не допустить бокового соскальзывания или переворачивания. Также пришлось предусмотреть алгоритм плавной автоматической посадки при потере радиосигнала. Из хитрого - использывание четырех основных пропорциональных каналов для передачи разовых исполнительных команд: срабатывание затвора фотоаппарата, включение звуковой пьезосирены, галогеновой лампы, габаритного освещения, срабатывание исполнительного устройства (сброс листовок, денежных банкнот или запуск фейверка ) и пр. У меня уже шоумены по месту моей загородней тусовки заказали сброс 20...30 десятирублевок на зрителей, которые пришли на массовые гуляния в местный парк. Деньги небольшие, но шуму и веселья достаточно. Еще деньги с желающих получить сразу свое фото с высоты птичьего полета. Классная развлекуха короче!
--------------------
Нравится, не нравится, терпи моя красавица... Работайте, братья!
Группа: Автор
Сообщений: 5927
Пользователь №: 34743
Регистрация: 9-July 08
Место жительства: Москва
Согласен. Я этой темой заинтересовался всего несколько дней назад, но уже столько интересного узнал. А главное в продаже есть любые комплектующие. Просто коммунизм. Только изобретай и конструируй. Когда начинаешь вникать в доступные возможности, начинаешь совсем по-другому видеть структуру своего девайса. Сейчас параллельно присматриваюсь к простейшей цифровой миниатюрной фото-мыльнице. С фиксированным фокусом, но с хорошей флэшкой и разрешением не менее 5мегапиксов. Съемка идет вслепую по визуальной ориентации квадралета, и чтоб потом можно было нужный фрагмент отснятой картинки выбрать и увеличить. Вроде ничего 712-CVSE-Silver хоть и Китай. Недорого, да и 100г вес подходящий. Естественно с питанием от борта. У нее режим есть три кадра в две секунды - очень пригодится. А остальное все в автомате. Удобно.
Это сообщение отредактировал ded - Jan 16 2010, 06:50 PM
--------------------
Нравится, не нравится, терпи моя красавица... Работайте, братья!
Группа: Автор
Сообщений: 5927
Пользователь №: 34743
Регистрация: 9-July 08
Место жительства: Москва
Этим займусь вторым этапом. Пока делаю автономно летающий вариант с фотоаппаратом. На аккумуляторе. Сегодня на рабочем моторе с винтом перепробывал разные варианты фрагментов будущего дизайна. Оказалось, что если маневрировать квадрику просто за счет перераспределения оборотов четырех движков, он будет очень инерционным. Кроме того, потребуется сложные контролерные коррекции по перераспределению оборотов между движками. Особенно при сложных траекториях. А вот если менять наклон движков, как в папелацах Аватара, то маневренность будет хорошая, и контролер вообще не понадобится. Движок ставится прямо на ось сервомашинки. Получается очень технологично. Пара движков отвечает за прямой и обратный ход, а другая за развороты. При этом не потребуются винты с обратной ротацией. Все компенсируется разворотной парой движков.
--------------------
Нравится, не нравится, терпи моя красавица... Работайте, братья!
Группа: Автор
Сообщений: 5927
Пользователь №: 34743
Регистрация: 9-July 08
Место жительства: Москва
Во-во, и я пришел экспериментальным путём именно к этому варианту управления. Четыре сервомашики. Изменяют наклон своего двигателя по одной оси. Плюс еще скорость между парами движков регулируется - для перемещения боком вокруг объекта фотосъемки, или для компенсации бокового ветра. Сервомашинка с усилием 1,2кг на валу весит 10г и габариты 22х22х12мм. Сам двигатель вместе с винтом весит всего 60г, но за счет гироэффекта от вращающегося винта усилия потребуются именно в таких пределах.
--------------------
Нравится, не нравится, терпи моя красавица... Работайте, братья!
Группа: Cоучастник
Сообщений: 1144
Пользователь №: 17903
Регистрация: 16-February 07
Место жительства: Москва
QUOTE (ded @ Jan 17 2010, 03:43 PM)
Во-во, и я пришел экспериментальным путём именно к этому варианту управления. Четыре сервомашики. Изменяют наклон своего двигателя по одной оси. Плюс еще скорость между парами движков регулируется - для перемещения боком вокруг объекта фотосъемки, или для компенсации бокового ветра. Сервомашинка с усилием 1,2кг на валу весит 10г и габариты 22х22х12мм. Сам двигатель вместе с винтом весит всего 60г, но за счет гироэффекта от вращающегося винта усилия потребуются именно в таких пределах.
1/2OFF Какой полет творческой мысли вызвал "Аватар"...
--------------------
"Очередной шаг вперед, как правило, результат хорошего пинка в зад!"(С)
Группа: Автор
Сообщений: 5927
Пользователь №: 34743
Регистрация: 9-July 08
Место жительства: Москва
Эти винты во всех простых летающих игрушках ставят. Вот еще одна реализация простого квадрика http://aeroquad.info/bin/view . Копаем глубже. При аварийном пропадании связи при помехе (или просто отрубился передатчик), а это как оказалось не такой уж редкий случай, включается режим аварийной посадки квадрика. С использыванием режима приемника Fail Save. Моторы переходят в режим аварийного спуска на заранее выбранных оборотах. Но все равно при этом посадка получается достаточно жесткой. Как вармант можно использывать упрощенную систему парктроника. Простейший УЗ радар увидит землю за пару метров и увеличит обороты двигателей до минимальной производной снижения. Кстати этот режим автоматической посадки можно включать и на этапе обучения пилотированию.
--------------------
Нравится, не нравится, терпи моя красавица... Работайте, братья!
Группа: Автор
Сообщений: 11664
Пользователь №: 39974
Регистрация: 1-December 08
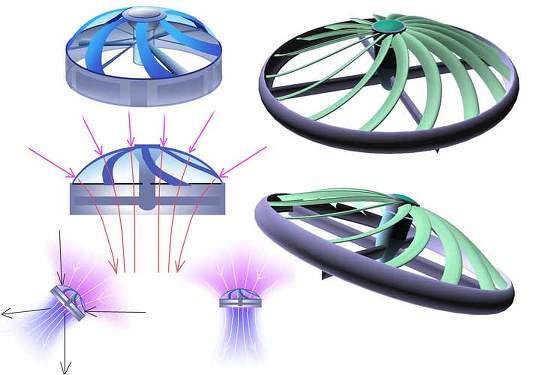
Куполообразный винт при падении превращается в парашют, т.е. имеет такой же эффект. Что касается пропадания связи, то ее можно дублировать. Насколько я знаю частота РУ моделей 2.4гиг, можно дублировать 4хх.хмег, приемник около 20гр. А если уж на то пошло, то GSM самое подходящее (изображение + управление) но дорого.
--------------------
Враг моего врага мой друг (?) Главное отличие свободного от раба - это отсутствие должности!
Группа: Автор
Сообщений: 26728
Пользователь №: 27360
Регистрация: 16-December 07
Место жительства: Ukraine
Потому на том квадрике выше (Parrot) вместо GSM используют WiFi. Игонят туда команды назад видео. А по ссылке Ded-а (последний квадрик) ZigBee для управления юзают. Видел модемы для ZigBee до полутора километров. (у "Гаммы" были)
Это сообщение отредактировал Eddy71 - Jan 19 2010, 01:37 PM
--------------------
«Мышление - это когда ты упрощаешь вещи, а не усложняешь их» /Жак Фреско/
Группа: Автор
Сообщений: 11664
Пользователь №: 39974
Регистрация: 1-December 08
Я так думаю, что легче и нужнее дублировать связь. WiFi думаю хорошо на коротких дистанциях и информативнее, но выходные УВЧ имеют относительно низкое КПД и менее надежные. Поэтому все таки предпочтение отдаю GSM, хотя дублирование думаю необходимо. Особенно если прибор не для игры.
Это сообщение отредактировал kaitipi - Jan 19 2010, 01:58 PM
--------------------
Враг моего врага мой друг (?) Главное отличие свободного от раба - это отсутствие должности!
Группа: Автор
Сообщений: 5927
Пользователь №: 34743
Регистрация: 9-July 08
Место жительства: Москва
Именно для игры, для развлекухи. Претендовать на серьезное - это несерьезно. А дублировать канал связи это лишний вес, да и громоздко по составу аппаратуры. Но как бы там ни было, автоматическая аварийная мягкая посадка быть обязана.
--------------------
Нравится, не нравится, терпи моя красавица... Работайте, братья!
Группа: Автор
Сообщений: 5927
Пользователь №: 34743
Регистрация: 9-July 08
Место жительства: Москва
Наконец собрал всю необходимую комплектуху. Штанги сделал из углепластика, несущий "кузов", в котором размещается аккумулятор и вся электроника - из стеклотестолита. На концах штанг стоят сервы. Сервы пришлось брать с металлическим редуктором и усилием на валу более 2кг. Слишком большое усилие требуется, чтоб ворочить движки с раскрученными до свиста винтами. Винты 10х3.8. Аккумулятор ЛиПол 3S 4800мАч. Фотокамера может быть любой. Отдельная серва просто нажимает на ее затвор. Я приобрел 10,2 мегапиксельную "ФуджиФильм" с 4Гигами на борту. Всего 120г. Позволяет непрерывно или по команде снимать раз в секунду до 1500 снимков. Еще на борту дымовая шашка по отдельной команде. И сброс денег или листовок тоже по отдельной команде. Еще по отдельной команде световое шоу на борту. По отдельной команде включается пьезосирена. Радиоуправление 8 канальное на 40 мГц. Общий полетный вес 1200г. Максимальная тяга движков 2400г, крейсерская - 1600г. Вот в общих чертах состав развлекухолета. Летные испытания планирую через несколько дней. Если все пойдет нормально на борт поставлю систему автоматической плавной посадки на УЗ датчиках. И самое главное - за счет низкосмещенного центра тяжести система не требует гиров и контролера. Она сама себя стабилизирует. Как парашут. В то же время система должна быть весьма маневренна. Планируемое время разворота на 360 гр. в любую сторону не более двух секунд. Управляемое падение с любой высоты с последующим включением движков (на торможение) на максимальной тяге возможно до высоты двух метров.
Это сообщение отредактировал ded - Jan 25 2010, 05:02 PM
Присоединённое изображение (Нажмите для увеличения)
--------------------
Нравится, не нравится, терпи моя красавица... Работайте, братья!
 Главная страница -> VRTP -> Texнологии -> Разное -> Радиоуправление
Главная страница -> VRTP -> Texнологии -> Разное -> Радиоуправление

 Новые книги
Новые книги Статистика
Статистика Группы:
Группы: Сейчас на сайте
Сейчас на сайте Всего: 576
Всего: 576 Гостей: 565
Гостей: 565 Анонимных: 1
Анонимных: 1 Пользователей: 10
Пользователей: 10 Зарегистрированные:
Зарегистрированные:







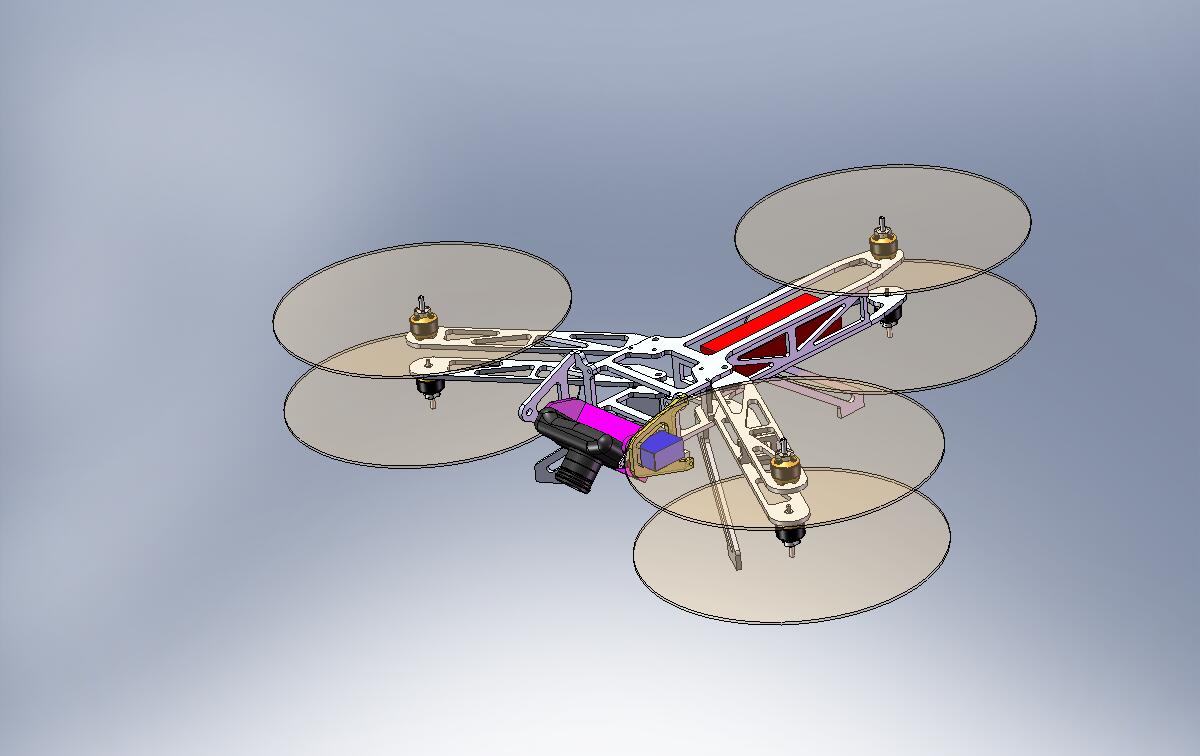
 Именно то, что я и хочу! Спасибо за фото.
Именно то, что я и хочу! Спасибо за фото.