Лучше брать Attiny2313, практически тоже самое, только с помощью fuse bits (их у AT90S2313 нет) можно запрограмить встроенный тактовик и выбросить кварц из схемы. Тогда габариты меньше будут, а в результате оригинальней конструкция.
Лучше брать Attiny2313, практически тоже самое, только с помощью fuse bits (их у AT90S2313 нет) можно запрограмить встроенный тактовик и выбросить кварц из схемы. Тогда габариты меньше будут, а в результате оригинальней конструкция.
понимаешь, у Attiny2313 двадцать ножек... Так что выигрыш в размере сомнительный. Да и нафига мне столько портов, робот кроме того что ездить больше ничего не умеет...с таким то питанием.
А что если моторчики использовать от старых мобильников. У них же там стоит виброзвонок. И размеры в принципе можно снизить до минимума. А еще аккумулятор с мобильника взять. И вообще можно много с мобильника взять.
Группа: Автор
Сообщений: 15657
Пользователь №: 2613
Регистрация: 17-November 05
QUOTE (CFox @ Mar 25 2006, 05:50 PM)
А что если моторчики использовать от старых мобильников. У них же там стоит виброзвонок. И размеры в принципе можно снизить до минимума. А еще аккумулятор с мобильника взять. И вообще можно много с мобильника взять.
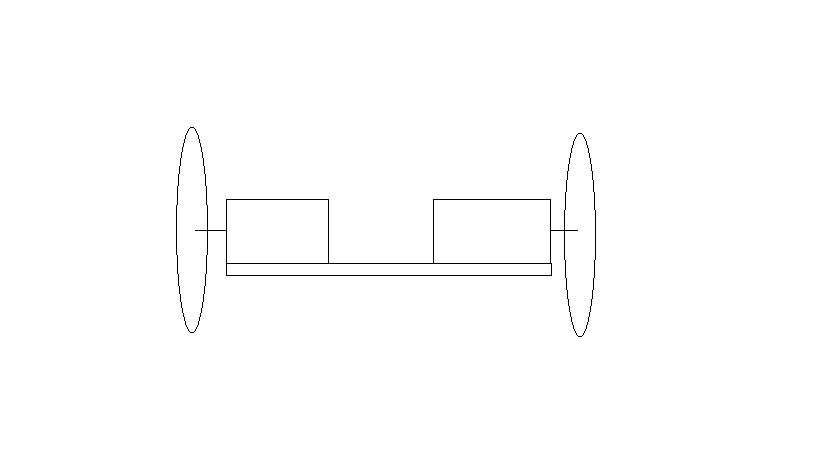
Можно вот такое расположение тогда при вращении колес в разные стороны он будет поворачивать. Двигатели с одной стороны печ платы с другой монтаж элементов.Единственная проблема, то что движки не шаговые, сложно выбирать угол поворота.
Это сообщение отредактировал Golum - Mar 28 2006, 04:49 AM
Присоединённое изображение (Нажмите для увеличения)
Группа: Cоучастник
Сообщений: 5700
Пользователь №: 1
Регистрация: 19-July 04
Место жительства: Воронеж
А вот это как раз и не проблема. Открою большую военную тайну.. В частности в военной технике никогда не встретишь шаговиков, но тем не менее там часто есть узлы поворота на определенный градус И сделано это на обычных движках! В чем секрет? ПОСЛЕ ПРОЧТЕНИЯ ДАННОГО ПОСТА ЕГО НУЖНО СЖЕЧЬ, растоптать ногами, сравнять с землей и съесть! если моторчик питать импульсами напряжения, причем в отсутствии ипульса напряжения обмотку нужно закорачивать - она от этого будет тормозить движок. Т.е. импульс напряжения и коротим обмотку сразуже. Будет не хуже шаговика работать. При желании точность передвижения этого робота будет не хуже 0,1 мм.
Группа: Admin
Сообщений: 51395
Пользователь №: 3
Регистрация: 26-January 05
Место жительства: Москва слезам не верит...
точно я тоже заметил если двигатель постоянного тока с магнитом замкнуть то его даже прокрутить сложно я подобный принцеп в конструкции радара использовал.
если моторчик питать импульсами напряжения, причем в отсутствии ипульса напряжения обмотку нужно закорачивать - она от этого будет тормозить движок. Т.е. импульс напряжения и коротим обмотку сразуже. Будет не хуже шаговика работать. При желании точность передвижения этого робота будет не хуже 0,1 мм.
Не забываем что тут нет редуктора и нет никакого отношения передач при любом импульсе если потом обмотка закорочена ротор либо повернется на определенный градус либо вернется в исходное положение и точность поворота приведенная выше врядли достижима. А вот поворот действительно будет возможен, тут все правильно.
Хотя если использовать шим... НО опять же наргузка индуктивная и тут уже своя наука. одно дело если просто ламочку плавно зажигать, совсем другое дело обмоткой управлять.
Группа: Cоучастник
Сообщений: 5700
Пользователь №: 1
Регистрация: 19-July 04
Место жительства: Воронеж
Со мной на выставке выставлялись ребята с микроскопом, где таким образом позиционируется столик с объектом наблюдения. без всяких редукторов, т.е. движок с шестерней и такаяже длинная шестерня (в длинну) на столике. так вот точность позиционирования 0,01 мм., но у них там обратная связь для увеличения точности была и задания относительной точки. А без обратной связи при точном таймере 0,1 мм за нехрен делать.
Со мной на выставке выставлялись ребята с микроскопом, где таким образом позиционируется столик с объектом наблюдения. без всяких редукторов, т.е. движок с шестерней и такаяже длинная шестерня (в длинну) на столике. так вот точность позиционирования 0,01 мм., но у них там обратная связь для увеличения точности была и задания относительной точки. А без обратной связи при точном таймере 0,1 мм за нехрен делать.
И что там тоже использовался коллекторный синхронный движок с числом пар полюсов 3?
Группа: Cоучастник
Сообщений: 5700
Пользователь №: 1
Регистрация: 19-July 04
Место жительства: Воронеж
Да там самый обычный движок, часто из таких делают микродрельки для сверловки плат. Кажется наз ДПМ чего-то там или около того. Воще я сам офигел и пока не увидел своими глазами, что все это работает Не мог поверить и врубиться что такое будет работать. Но факт! Движок от игрушек конечно не подойдет, там всетаки есть некоторые устойчивые положения, а вот движки постоянного тока с 3 контактами на коллекторе не имеющие устойчивых равновесных положений работать должны.
И все таки я не понимаю зачем тут использовать микроконтроллер. Разве нельзя использовать простой усилитель тока и в зависимости от интенсивности света будет меняться ток в моторчике и скорость поворота. И еще напрямую моторчики эти к контроллеру подключаются или нужен усилитель тока?
 Главная страница -> VRTP -> Texнологии -> Микропроцессоры. -> МК общий форум.
Главная страница -> VRTP -> Texнологии -> Микропроцессоры. -> МК общий форум.

 Новые книги
Новые книги Статистика
Статистика Группы:
Группы: Сейчас на сайте
Сейчас на сайте Всего: 538
Всего: 538 Гостей: 532
Гостей: 532 Анонимных: 0
Анонимных: 0 Пользователей: 6
Пользователей: 6 Зарегистрированные:
Зарегистрированные:

 Ездит прямо на осях
Ездит прямо на осях 








 понимаешь, у Attiny2313 двадцать ножек... Так что выигрыш в размере сомнительный. Да и нафига мне столько портов, робот кроме того что ездить больше ничего не умеет...с таким то питанием.
понимаешь, у Attiny2313 двадцать ножек... Так что выигрыш в размере сомнительный. Да и нафига мне столько портов, робот кроме того что ездить больше ничего не умеет...с таким то питанием. 




 добавь к нему радиоуправление и будет те супер клоп %_!!
добавь к нему радиоуправление и будет те супер клоп %_!!